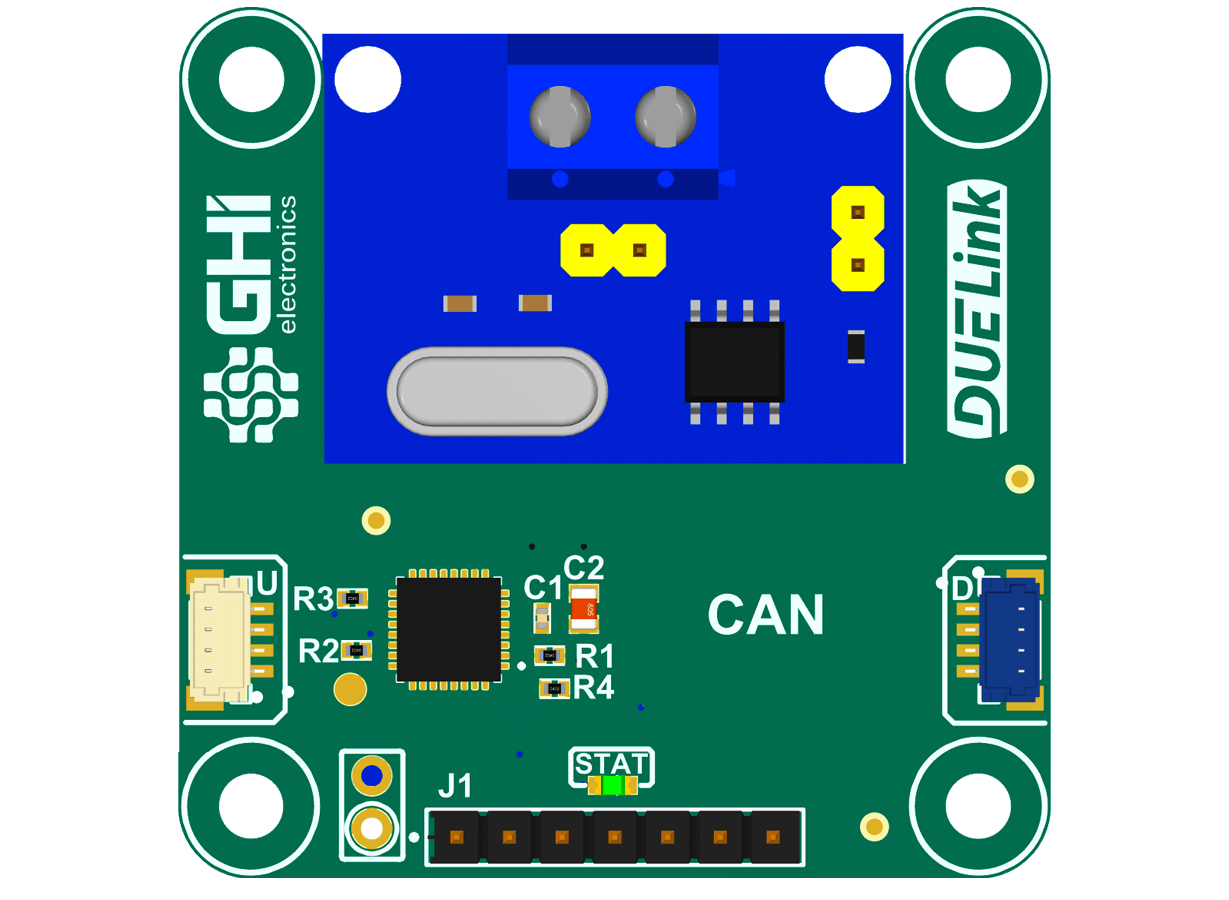
CAN
 |  |  |  |
CAN Bus Controller
- Overview
- Drivers
- Samples
Access CAN data in automotive and industrial settings. Read and Write frames with standard and extended Arbitration ID.
Key features • Support CAN V2.0B | Resources |
See Drivers page for further details.
| Function | Description |
|---|---|
Bitrate(b) | Sets the b bitrate (125K, 250K, 500K, 1M) |
RxFull() | Returns 1 if there is a received CAN message. |
RxRd() | Reads a received message. Returns the ArbID of the message or -1 if none. b9 is a 9-byte array contains the message body, with first element containing DLC followed by 0 to 8 bytes of data. |
TxFree() | Returns 1 if ready for new data, or previous transmit request succeeded. |
TxReq(i,l,b9) | Request to send a message with i EID and l length of the b9 data array. Returns 1 if a message was posted or 0 if busy to take a new one. |
DVer() | This driver version. |
The Code!
CAN Driver
loading...
Samples assumes Drivers are installed.
- Script
Script Sample
loading...
Python Sample
loading...
JavaScript Sample
loading...
Coming soon!
Ordering Info
| Product | Part Number | Price | DUELink CAN | GDL-CMCAN-B | $00.00 |
|---|