Accel
 |  |  |  |
3-Axis Accelerometer
- Overview
- Drivers
- Samples
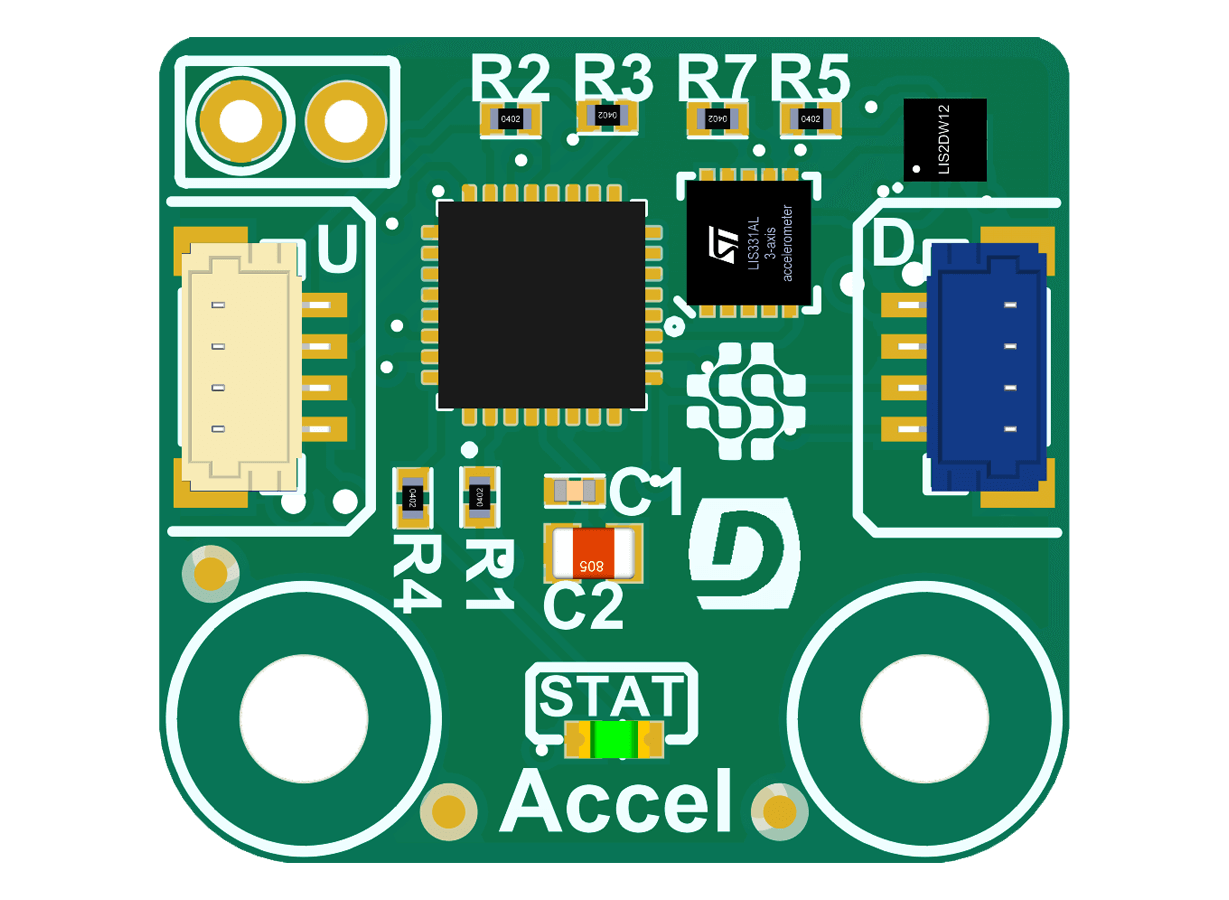
This 3-axis accelerometer can be used to detect motion, tilt, and acceleration just to name a few.
Key features • Detect motion, tilt and acceleration | Resources |
See Drivers page for further details.
| Function | Description |
|---|---|
GetX() | Returns X value. |
GetY() | Returns Y value. |
GetZ() | Returns Z value. |
DVer() | This driver version. |
The Code!
Accel Driver
loading...
- Script
- Python
- JavaScript
Use Console to modify the default driver by adding this sample.
Script Sample
loading...
Python Sample
loading...
JavaScript Sample
loading...
Coming soon!
Ordering Info
| Product | Part Number | Price | DUELink Accel Sensor | GDL-SEACCEL-A | $00.00 |
|---|